



တံဆိပ်တုံးထုခြင်း/ပုံခြင်း စက်ရုပ် SDCX RMD-300/200/160/120/35/08/110/20/50
နည်းပညာဆိုင်ရာ ကန့်သတ်ချက်များ
| မော်ဒယ်နံပါတ် | လွတ်လပ်မှုဘွဲ့ | မောင်းနှင်မှုမုဒ် | ဝန်ဆောင်ခ (KG) | ထပ်ခါတလဲလဲ နေရာချထားမှု တိကျမှု (မီလီမီတာ) | ရွေ့လျားမှုအတိုင်းအတာ (°) | အမြင့်ဆုံးမြန်နှုန်း (°/s) | လက်ကောက်ဝတ်၏ ဝန်အားအား (kg·m2) | စက်ဝိုင်းရိုက်ချက် (စက်ဝန်း/နာရီ) | ရွေ့လျားမှု အချင်းဝက် (မီလီမီတာ) | Local Weight (ကီလိုဂရမ်) | ||||||
| J1 | J2 | J3 | J4 | J1 | J2 | J3 | J4 | |||||||||
| SDCX-RMD300 | 4 | AC servo drive | ၃၀၀ | ±0.5 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 85 | 90 | ၁၀၀ | ၁၉၀ | ၁၃၄ | ၁၀၀၀③ | ၃၁၅၀ | ၁၅၀၀ |
| SDCX-RMD200 | 4 | AC servo drive | ၂၀၀ | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | ၁၀၅ | ၁၀၇ | ၁၁၄ | ၂၄၂ | 78 | ၁၃၀၀③ | ၃၁၅၀ | ၁၅၀၀ |
| SDCX-RMD160 | 4 | AC servo drive | ၁၆၀ | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | ၁၂၃ | ၁၂၃ | ၁၂၈ | ၃၀၀ | 78 | ၁၅၀၀③ | ၃၁၅၀ | ၁၅၀၀ |
| SDCX-RMD120 | 4 | AC servo drive | ၁၂၀ | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | ၁၂၈ | ၁၂၆ | ၁၃၅ | ၃၀၀ | 78 | ၁၅၆၀③ | ၃၁၅၀ | ၁၅၀၀ |
| SDCX-RMD50 | 4 | AC servo drive | 50 | ±0.2 | ±178 | ± +90~-40 | ± +65~-78 | ±360 | ၁၇၁ | ၁၇၁ | ၁၇၁ | ၂၂၂ | ၄.၅ | ၁၇၀၀② | ၂၀၄၀ | ၆၆၀ |
| SDCX-RMD20 | 4 | AC servo drive | 20 | ±0.08 | ±1170 | ± +115~-25 | ± +70~-90 | ±360 | ၁၇၀ | ၁၇၀ | ၁၈၅ | ၃၃၀ | ၀.၅၁ | ၁၇၈၀① | ၁၇၂၀ | ၂၅၆ |
| SDCX-RMD08 | 4 | AC servo drive | 8 | ±0.08 | ±170 | ± +90~-40 | ± +၆၈~-၉၀ | ±360 | ၂၅၁ | ၁၉၅ | ၁၉၅ | ၃၆၇.၅ | ၀.၂၅ | ၁၈၀၀① | ၁၄၃၃ | ၁၈၀ |
မှတ်ချက်များ
① စမ်းသပ်မှုလမ်းကြောင်းသည် 150mm မြင့်ပြီး 1000mm ကျယ်ပြီး အမှန်တကယ် လုပ်ငန်းခွင်အချိန်အား အမှန်တကယ် သက်ရောက်မှုရှိသည်။
② စမ်းသပ်မှုလမ်းကြောင်းသည် အမြင့် 200 မီလီမီတာနှင့် 1000 မီလီမီတာ ကျယ်ဝန်းပြီး အမှန်တကယ် လုပ်ငန်းခွင်အခြေအနေကြောင့် လည်ပတ်ချိန်ကို သက်ရောက်မှုရှိသည်။
③ စမ်းသပ်မှုလမ်းကြောင်းသည် 400mm မြင့်ပြီး 2000mm ကျယ်ကာ၊ အမှန်တကယ် လုပ်ငန်းခွင်အချိန်သည် အမှန်တကယ် အလုပ်အခြေအနေကြောင့် ထိခိုက်ပါသည်။
မီးလောင်လွယ်သော၊ ပေါက်ကွဲစေတတ်သော ဓာတ်ငွေ့များနှင့် အရည်များနှင့် ထိတွေ့ခြင်းကို ရှောင်ကြဉ်ပါ။ ရေ၊ ဆီ၊ ဖုန်မှုန့်တို့နှင့် မပက်မယှက်၊ လျှပ်စစ်ဆူညံသံအရင်းအမြစ်များ (ပလာစမာ) နှင့်ဝေးဝေးထားပါ။
ရွေ့လျားမှုအတိုင်းအတာ
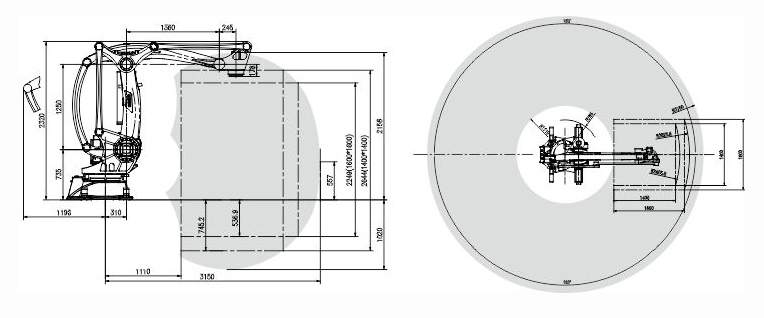
SDCX-RMD300/200/160/120 အတွက် ရွေ့လျားမှုအပိုင်းအခြား
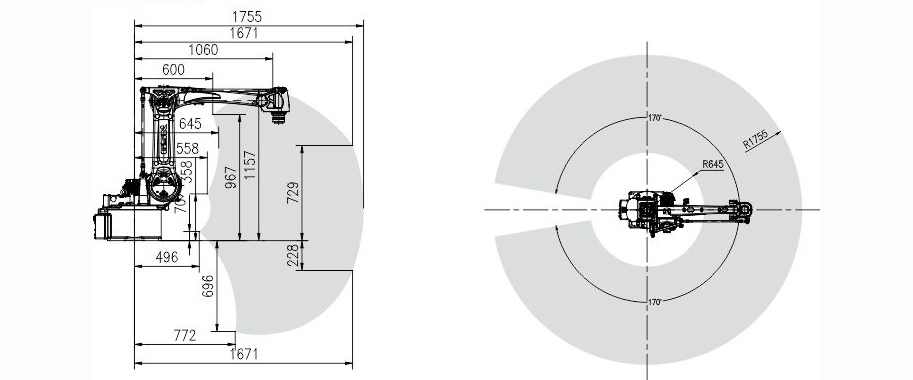
SDCX-RMD20 အတွက် ရွေ့လျားမှုအပိုင်းအခြား
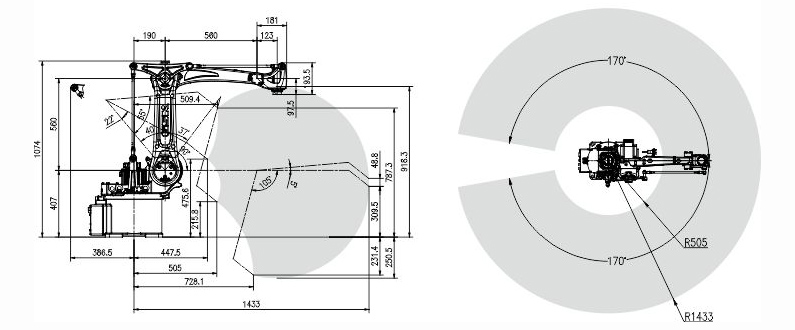
SDCX-RMD08 အတွက် Motion Range အပိုင်း
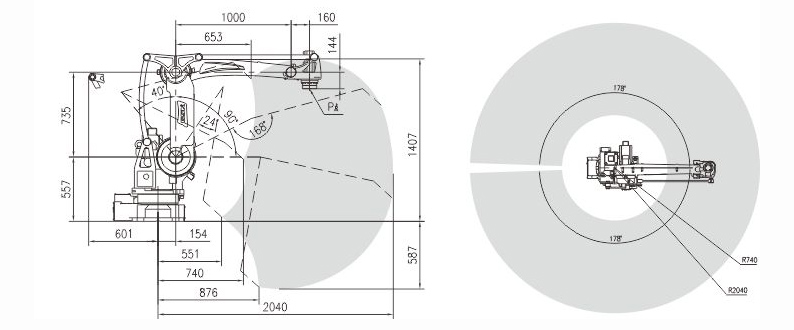
SDCX-RMD50 အတွက် Motion Range အပိုင်း
ထုတ်ကုန်အပလီကေးရှင်းကို ပြသခြင်း။
ဖြေရှင်းချက်များ
သံမဏိကွိုင် ကိုင်တွယ်ခြင်းဆိုင်ရာ နည်းပညာဆိုင်ရာ စီမံချက်












