



Three-Axis Horizontal Turn Positioner / Welding Robot Positioner
နည်းပညာဆိုင်ရာ ကန့်သတ်ချက်များ
| Vertical Turnover Triaxial Servo Positioner | အလျားလိုက် Rotary Triaxial Servo Positioner | ||||||
| နံပါတ်စဥ် | စီမံကိန်းများ | ကန့်သတ်ချက် | ကန့်သတ်ချက် | မှတ်ချက်များ | ကန့်သတ်ချက် | ကန့်သတ်ချက် | မှတ်ချက်များ |
| 1 | အဆင့်သတ်မှတ်ပေးပါသည်။ | 500 ကီလိုဂရမ် | 1000kg | ဒုတိယဝင်ရိုး၏ R400mm အချင်းဝက်အတွင်း | 500 ကီလိုဂရမ် | 1000kg | ဒုတိယဝင်ရိုး၏ R400mm/R500mm အချင်းဝက်အတွင်း |
| 2 | ဗိုင်းလိပ်တံ၏စံ gyration အချင်းဝက် | R1200mm | R1500mm | R1200mm | R1800mm | ||
| 3 | တန်ပြန်ရှပ်၏ ပုံမှန် gyration အချင်းဝက် | R400mm | R500mm | R400mm | R500mm | ||
| 4 | ပထမဝင်ရိုးလှန်ထောင့် | ±180° | ±180° | ±180° | ±180° | ||
| 5 | ဒုတိယဝင်ရိုးလည်ပတ်ထောင့် | ±360° | ±360° | ±360° | ±360° | ||
| 6 | ပထမဝင်ရိုး၏ အလှည့်အပြောင်းအမြန်နှုန်းကို အဆင့်သတ်မှတ်ထားသည်။ | 50°/S | 24°/S | 50°/S | 24°/S | ||
| 7 | စက္ကန့်ဝင်ရိုး၏ လှည့်နှုန်းကို အဆင့်သတ်မှတ်ထားသည်။ | 70°/S | 70°/S | 70°/S | 70°/S | ||
| 8 | နေရာချထားမှု တိကျမှုကို ပြန်လုပ်ပါ။ | ±0.10mm | ±0.20mm | ±0.10mm | ±0.20mm | ||
| 9 | ရွှေ့ပြောင်းခြင်းဘောင်၏ နယ်နိမိတ်အတိုင်းအတာ (အလျား×အနံ×အမြင့်) | 2200mm × 800mm × 90mm | 3200mm × 1000mm × 110mm | 2200mm × 800mm × 90mm | 3200mm × 1000mm × 110mm | ||
| 10 | ရာထူးပြောင်းရွေ့မှု၏ ယေဘုယျအတိုင်းအတာ (အလျား×အနံ×အမြင့်) | 4000mm × 700mm × 1650mm | 5200mm × 1000mm × 1850mm | 4000mm × 700mm × 1650mm | 4500mm × 3600mm × 1750mm | ||
| 11 | ပထမဝင်ရိုးလည်ပတ်မှု၏ အလယ်ဗဟို | 1350mm | 1500mm | 800mm | 1000mm | ||
| 12 | ပါဝါထောက်ပံ့မှုအခြေအနေများ | သုံးဆင့် 200V ± 10% 50HZ | သုံးဆင့် 200V ± 10% 50HZ | သုံးဆင့် 200V ± 10% 50HZ | သုံးဆင့် 200V ± 10% 50HZ | isolation transformer ဖြင့် | |
| 13 | လျှပ်ကာအတန်း | H | H | H | H | ||
| 14 | ပစ္စည်းများ၏ အသားတင်အလေးချိန် | 1800 ကီလိုဂရမ်ခန့် | 3000 ကီလိုဂရမ်ခန့် | 2000 ကီလိုဂရမ်ခန့် | 2000 ကီလိုဂရမ်ခန့် | ||
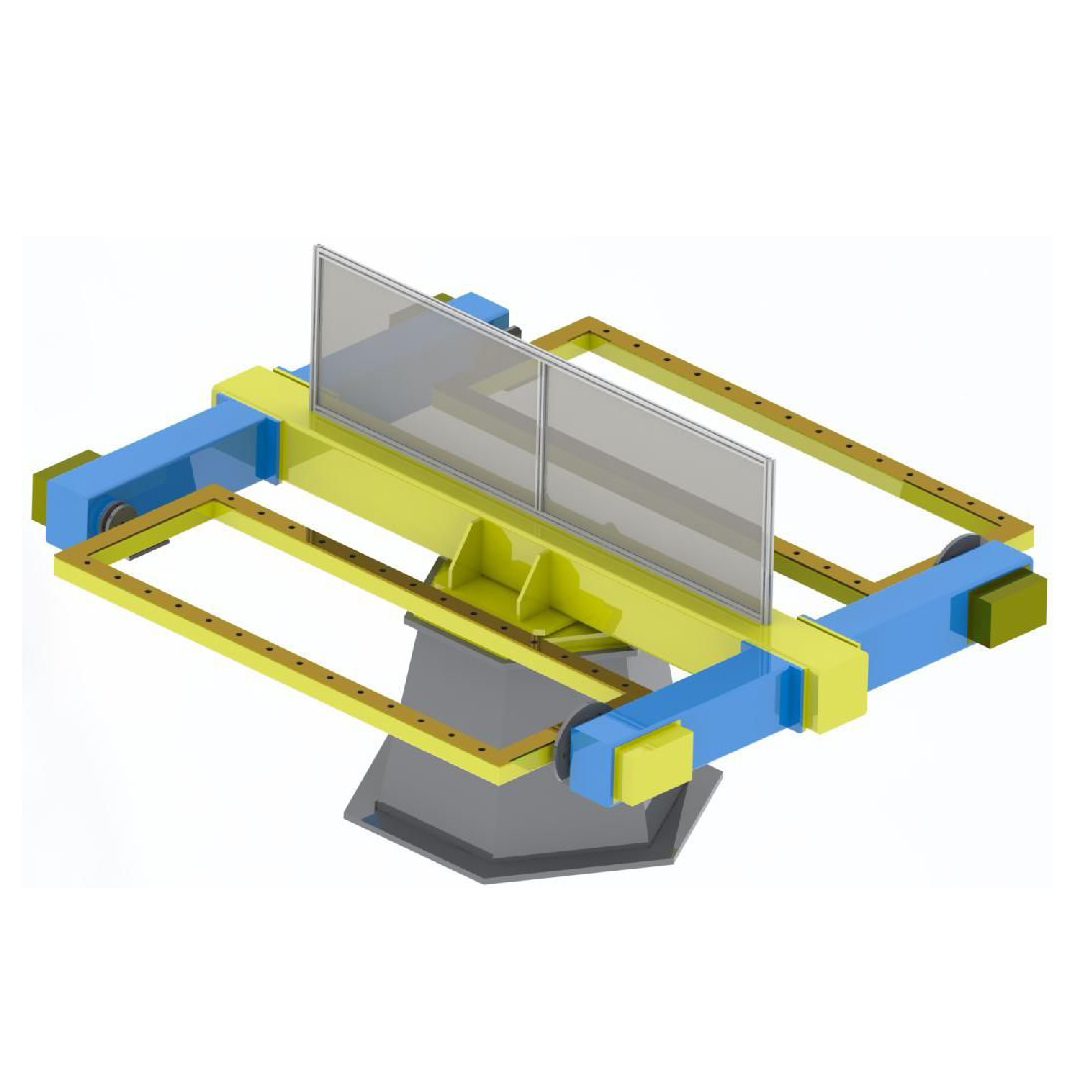
အလျားလိုက် Rotary Triaxial Servo Positioner

Vertical Turnover Triaxial Servo Positioner
ဖွဲ့စည်းပုံနိဒါန်း
triaxial vertical turnover servo positioner သည် အဓိကအားဖြင့် welded integral frame၊ turnover displacement frame၊ AC servo motor နှင့် RV precision reducer၊ rotary support၊ conductive ယန္တရား၊ protective shield နှင့် လျှပ်စစ်ထိန်းချုပ်မှုစနစ်တို့ ဖြစ်သည်။
welded integral frame ကို အရည်အသွေးမြင့် ပရိုဖိုင်များဖြင့် ဂဟေဆော်ထားသည်။ ပျော့ပျောင်းပြီး ဖိစီးမှုကို သက်သာစေပြီးနောက်၊ မြင့်မားသော စက်ယန္တရားတိကျမှုနှင့် သော့ချက်ရာထူးများ၏ တိကျမှုကို သေချာစေရန် ပရော်ဖက်ရှင်နယ် စက်ယန္တရားဖြင့် စီမံဆောင်ရွက်ရမည်။ မျက်နှာပြင်ကို သံချေးမတက်အောင် သုတ်လိမ်းထားပြီး လှပပြီး ရက်ရောစွာ ဖျန်းထားပြီး အရောင်ကို သုံးစွဲသူများ၏ လိုအပ်ချက်အရ စိတ်ကြိုက်ပြင်ဆင်နိုင်သည်။
Turnover displacement frame ကို အရည်အသွေးမြင့် ပရိုဖိုင်စတီးလ်ဖြင့် ဂဟေဆော်ပြီး ပရော်ဖက်ရှင်နယ် စက်ယန္တရားဖြင့် လုပ်ဆောင်ရမည်။ တပ်ဆင်ခြင်းနေရာချထားခြင်းကိရိယာအတွက် စံချည်အပေါက်များဖြင့် စက်ယန္တရားပြုလုပ်ရမည်ဖြစ်ပြီး ဆေးသုတ်ခြင်းနှင့် အမည်းစက်နှင့် သံချေးတက်ခြင်းတို့ကို ကာကွယ်ခြင်း ကုသခြင်းတို့ကို ဆောင်ရွက်ရမည်။
RV reducer ပါသော AC ဆာဗာမော်တာအား လည်ပတ်မှုတည်ငြိမ်မှု၊ နေရာချထားမှုနှင့် တိကျမှုကို သေချာစေသည့် ပါဝါယန္တရားအဖြစ် ရွေးချယ်ထားသည်။
ကြာရှည်ခံမှုနှင့် ချို့ယွင်းမှုနှုန်း နည်းပါးသည်။ လျှပ်ကူးနိုင်သော ယန္တရားအား ကြေးဝါဖြင့်ပြုလုပ်ထားပြီး ကောင်းသောလျှပ်ကူးနိုင်သောအကျိုးသက်ရောက်မှုရှိသည်။ လျှပ်ကူးပစ္စည်းအခြေခံသည် ဆာဗိုမော်တာ၊ စက်ရုပ်နှင့် ဂဟေပါဝါအရင်းအမြစ်တို့ကို ထိထိရောက်ရောက်ကာကွယ်ပေးနိုင်သည့် ပေါင်းစပ်လျှပ်ကာကို လက်ခံပါသည်။
လျှပ်စစ်ထိန်းချုပ်မှုစနစ်သည် တည်ငြိမ်သောစွမ်းဆောင်ရည်နှင့် ချို့ယွင်းမှုနှုန်းနည်းပါးသော positioner ကိုထိန်းချုပ်ရန်အတွက် Japanese Omron PLC ကိုလက်ခံပါသည်။ အရည်အသွေးနှင့် တည်ငြိမ်မှုရှိစေရန်အတွက် ပြည်တွင်းပြည်ပရှိ နာမည်ကြီးအမှတ်တံဆိပ်များမှ လျှပ်စစ်အစိတ်အပိုင်းများကို ရွေးချယ်ထားပါသည်။
အလင်းပိတ်ဆို့ခြင်းအကာအရံအား ဂဟေဆော်ခြင်းနှင့် ဖြတ်တောက်စဉ်အတွင်း ထုတ်ပေးသော arc light ကိုကာကွယ်ရန် အလူမီနီယမ်ပရိုဖိုင်နှင့် အလူမီနီယမ်ပလပ်စတစ်ပြားဖြင့် တပ်ဆင်ထားသည်။








