




C/L/U အမျိုးအစား Dual Axis Servo Positioner
နည်းပညာဆိုင်ရာ ကန့်သတ်ချက်များ
| C-type double-axis servo positioner | L-အမျိုးအစား ဝင်ရိုးနှစ်ထပ် ဆာဗိုတည်နေရာပြကိရိယာ | U-type နှစ်ထပ်ဝင်ရိုးဆာဗာအနေအထားပြကိရိယာ | |||||||||||
| နံပါတ်စဥ် | စီမံကိန်းများ | ကန့်သတ်ချက် | ကန့်သတ်ချက် | ကန့်သတ်ချက် | မှတ်ချက်များ | ကန့်သတ်ချက် | ကန့်သတ်ချက် | ကန့်သတ်ချက် | မှတ်ချက်များ | ကန့်သတ်ချက် | ကန့်သတ်ချက် | ကန့်သတ်ချက် | မှတ်ချက်များ |
| 1 | အဆင့်သတ်မှတ်ပေးပါသည်။ | 200 ကီလိုဂရမ် |
500 ကီလိုဂရမ် | 1000kg | ဒုတိယဝင်ရိုး၏ R400mm/R400mm/R600mm အချင်းဝက်အတွင်း | 500 ကီလိုဂရမ် | 1000kg | 2000kg | ဒုတိယဝင်ရိုး၏ R400mm/R600mm/R800mm အချင်းဝက်အတွင်း | 1000kg | 3000KG | 5000KG | ဒုတိယဝင်ရိုး၏ R600mm/R1500mm/R2000mm အချင်းဝက်အတွင်း |
| 2 | gyration ၏စံအချင်းဝက် | R400mm | R400mm | R600mm |
| R400mm | R600mm | R800mm |
| R600mm | R1500mm | R2000mm |
|
| 3 | ပထမဝင်ရိုးလှန်ထောင့် | ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
|
| 4 | ဒုတိယဝင်ရိုးလည်ပတ်ထောင့် | ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
|
| 5 | ပထမဝင်ရိုး၏ အလှည့်အပြောင်းအမြန်နှုန်းကို အဆင့်သတ်မှတ်ထားသည်။ | 50°/S | 50°/S | 15°/S |
| 50°/S | 50°/S | 17°/S |
| 17°/S | 17°/S | 17°/S |
|
| 6 | ဒုတိယဝင်ရိုး၏ လှည့်နှုန်းအဆင့်သတ်မှတ်ထားသည်။ | 70°/S | 70°/S | 70°/S |
| 70°/S | 70°/S | 17°/S |
| 24°/S | 17°/S | 24°/S |
|
| 7 | နေရာချထားမှု တိကျမှုကို ပြန်လုပ်ပါ။ | ±0.10mm | ±0.15mm | ±0.20mm |
| ±0.10mm | ±0.10mm | 17°/S |
| ±0.15mm | ±0.20mm | ±0.25mm |
|
| 8 | ရွှေ့ပြောင်းခြင်းဘောင်၏ နယ်နိမိတ်အတိုင်းအတာ (အလျား×အနံ×အမြင့်) | 1200mm × 600mm × 70mm | 1600mm × 800mm × 90mm | 2000mm×1200mm×90mm |
| - | - | - |
| - | - | - |
|
| 9 | ရာထူးပြောင်းရွေ့မှု၏ ယေဘုယျအတိုင်းအတာ (အလျား×အနံ×အမြင့်) | 2000mm × 1100mm × 1700mm | 2300mm × 1200mm × 1900mm | 2700mm × 1500mm × 2200mm |
| 1500mm × 500mm × 850mm | 2000mm × 750mm × 1200mm | 2400mm × 900mm × 1600mm |
| 4200mm × 700mm × 1800mm | 5500mm × 900mm × 2200mm | 6500mm × 1200mm × 2600mm |
|
| 10 | စံဝင်ရိုးနှစ်ချောင်း လှည့်ပတ်ပြား | - | - | - | - | Φ800mm | Φ1200mm | Φ1500mm |
| Φ1500mm | Φ1800mm | Φ2000mm |
|
| 11 | ပထမဝင်ရိုးလည်ပတ်မှု၏ အလယ်ဗဟို
| 1200mm | 1350mm | 1600mm |
| 550mm | 800mm | 1000mm |
| 1500mm | 1750mm | 2200mm |
|
| 12 | ပါဝါထောက်ပံ့မှုအခြေအနေများ | သုံးဆင့် 200V ± 10% 50HZ | သုံးဆင့် 200V ± 10% 50HZ | သုံးဆင့် 200V ± 10% 50HZ | isolation transformer ဖြင့် | သုံးဆင့် 200V ± 10% 50HZ | သုံးဆင့် 200V ± 10% 50HZ | သုံးဆင့် 200V ± 10% 50HZ | isolation transformer ဖြင့် | သုံးဆင့် 200V ± 10% 50HZ | သုံးဆင့် 200V ± 10% 50HZ | သုံးဆင့် 200V ± 10% 50HZ | isolation transformer ဖြင့် |
| 13 | လျှပ်ကာအတန်း | H | H | H |
| H | H | H |
| H | H | H |
|
| 14 | ပစ္စည်းများ၏ အသားတင်အလေးချိန် | 800 ကီလိုဂရမ်ခန့် | 1300 ကီလိုဂရမ်ခန့် | 2000 ကီလိုဂရမ်ခန့် |
| 900 ကီလိုဂရမ်ခန့် | 1600 ကီလိုဂရမ်ခန့် | 2500 ကီလိုဂရမ်ခန့် |
| 2200 ကီလိုဂရမ်ခန့် | 4000 ကီလိုဂရမ်ခန့် | 6000 ကီလိုဂရမ်ခန့် | |
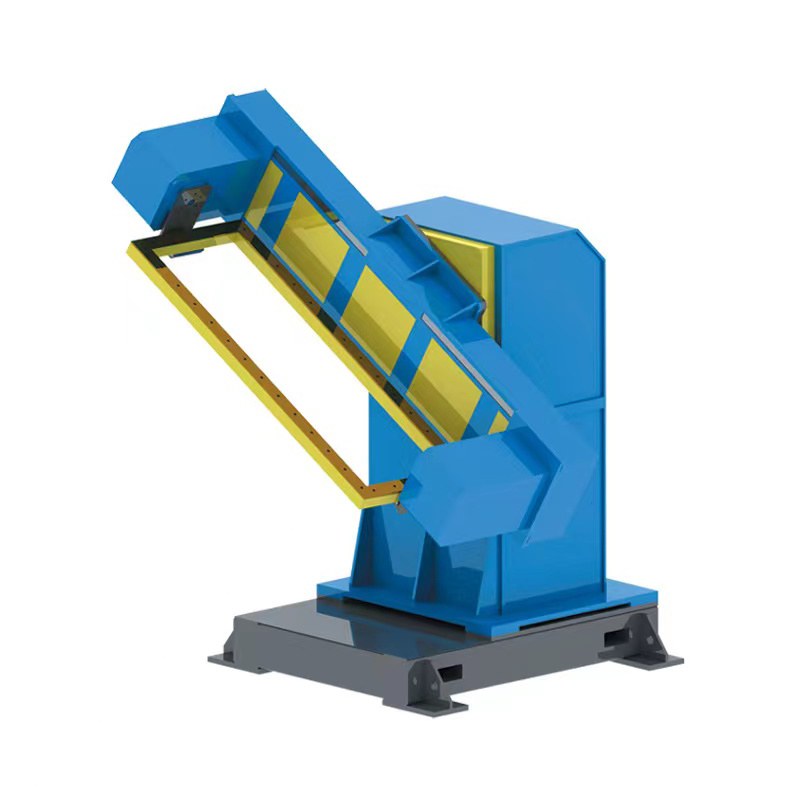
C-type double-axis servo positioner
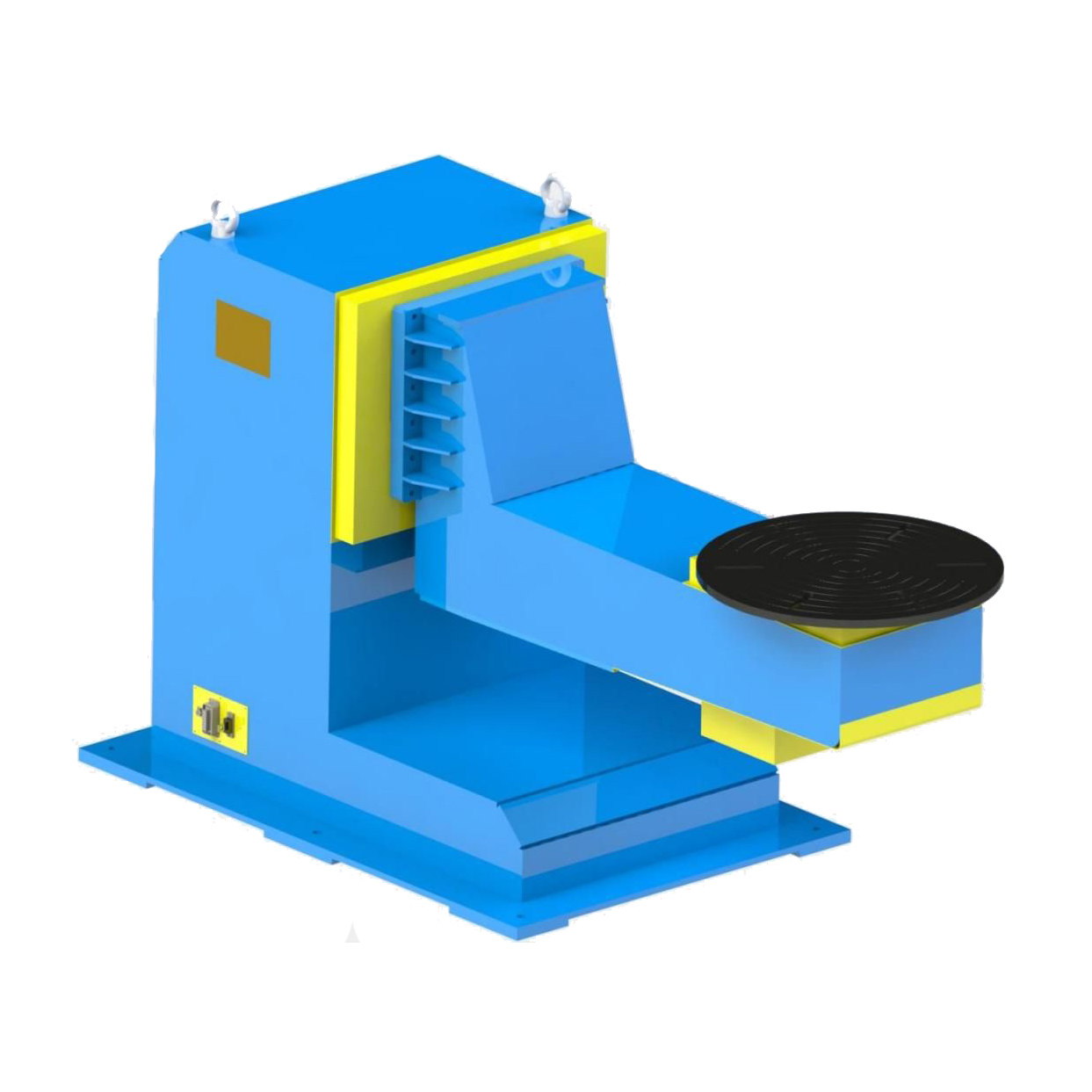
L-အမျိုးအစား ဝင်ရိုးနှစ်ထပ် ဆာဗိုတည်နေရာပြကိရိယာ

U-type နှစ်ထပ်ဝင်ရိုးဆာဗာအနေအထားပြကိရိယာ
ဖွဲ့စည်းပုံနိဒါန်း
Dual axis servo positioner တွင် အဓိကအားဖြင့် welded integral frame၊ welding displacement frame၊ AC servo motor နှင့် RV precision reducer၊ rotary support၊ conductive ယန္တရား၊ protective shield နှင့် electronic control system တို့ဖြင့် ဖွဲ့စည်းထားသည်။ welded integral frame ကို အရည်အသွေးမြင့် ပရိုဖိုင်များဖြင့် ဂဟေဆော်ထားသည်။ ပျော့ပျောင်းပြီး ဖိစီးမှုကို သက်သာစေပြီးနောက်၊ မြင့်မားသော စက်ယန္တရားတိကျမှုနှင့် သော့ချက်ရာထူးများ၏ တိကျမှုကို သေချာစေရန် ပရော်ဖက်ရှင်နယ် စက်ယန္တရားဖြင့် စီမံဆောင်ရွက်ရမည်။ မျက်နှာပြင်ကို သံချေးမတက်အောင် သုတ်လိမ်းထားပြီး လှပပြီး ရက်ရောစွာ ဖျန်းထားပြီး အရောင်ကို သုံးစွဲသူများ၏ လိုအပ်ချက်အရ စိတ်ကြိုက်ပြင်ဆင်နိုင်သည်။
welded displacement frame ကို အရည်အသွေးမြင့် ပရိုဖိုင်စတီးဖြင့် ဂဟေဆော်ပြီး ပုံသွင်းကာ ပရော်ဖက်ရှင်နယ် စက်ယန္တရားဖြင့် စီမံဆောင်ရွက်ရမည်။ မျက်နှာပြင်ကို တပ်ဆင်နေရာချထားခြင်းကိရိယာအတွက် စံဝက်အူအပေါက်များဖြင့် စက်ယန္တရားပြုလုပ်ရမည်ဖြစ်ပြီး ဆေးသုတ်ခြင်းနှင့် အမည်းစက်နှင့် သံချေးတက်ခြင်းတို့ကို ကာကွယ်ခြင်း ကုသခြင်းတို့ကို ဆောင်ရွက်ရမည်။
rotary ပလပ်ဖောင်းသည် ပရော်ဖက်ရှင်နယ် စက်ပိုင်းဆိုင်ရာ လုပ်ဆောင်ပြီးနောက် အရည်အသွေးမြင့် ပရိုဖိုင်စတီးလ်ကို ရွေးချယ်ကာ မျက်နှာပြင်အား တပ်ဆင်နေရာချထားခြင်းကိရိယာအတွက် စံဝက်အူအပေါက်များဖြင့် စက်ဖြင့်ပြုလုပ်ထားပြီး အနက်ရောင်နှင့် သံချေးတက်ခြင်းတို့ကို ကာကွယ်ရေး ကုသမှုကို ဆောင်ရွက်ရမည်ဖြစ်သည်။
ပါဝါယန္တရားအဖြစ် AC servo motor နှင့် RV reducer ကိုရွေးချယ်ခြင်းသည် လည်ပတ်မှုတည်ငြိမ်မှု၊ နေရာချထားမှုတိကျမှု၊ ကြာရှည်ခံနိုင်မှုနှင့် ချို့ယွင်းမှုနှုန်းနည်းပါးမှုကို သေချာစေနိုင်သည်။ လျှပ်ကူးနိုင်သော ယန္တရားအား ကြေးဝါဖြင့်ပြုလုပ်ထားပြီး ကောင်းသောလျှပ်ကူးနိုင်သောအကျိုးသက်ရောက်မှုရှိသည်။ လျှပ်ကူးပစ္စည်းအခြေခံသည် ဆာဗိုမော်တာ၊ စက်ရုပ်နှင့် ဂဟေပါဝါအရင်းအမြစ်တို့ကို ထိထိရောက်ရောက်ကာကွယ်ပေးနိုင်သည့် ပေါင်းစပ်လျှပ်ကာကို လက်ခံပါသည်။
လျှပ်စစ်ထိန်းချုပ်မှုစနစ်သည် တည်ငြိမ်သောစွမ်းဆောင်ရည်နှင့် ချို့ယွင်းမှုနှုန်းနည်းပါးသော positioner ကိုထိန်းချုပ်ရန်အတွက် Japanese Omron PLC ကိုလက်ခံပါသည်။ အရည်အသွေးနှင့် တည်ငြိမ်မှုရှိစေရန်အတွက် ပြည်တွင်းပြည်ပရှိ နာမည်ကြီးအမှတ်တံဆိပ်များမှ လျှပ်စစ်အစိတ်အပိုင်းများကို ရွေးချယ်ထားပါသည်။











